Teaser
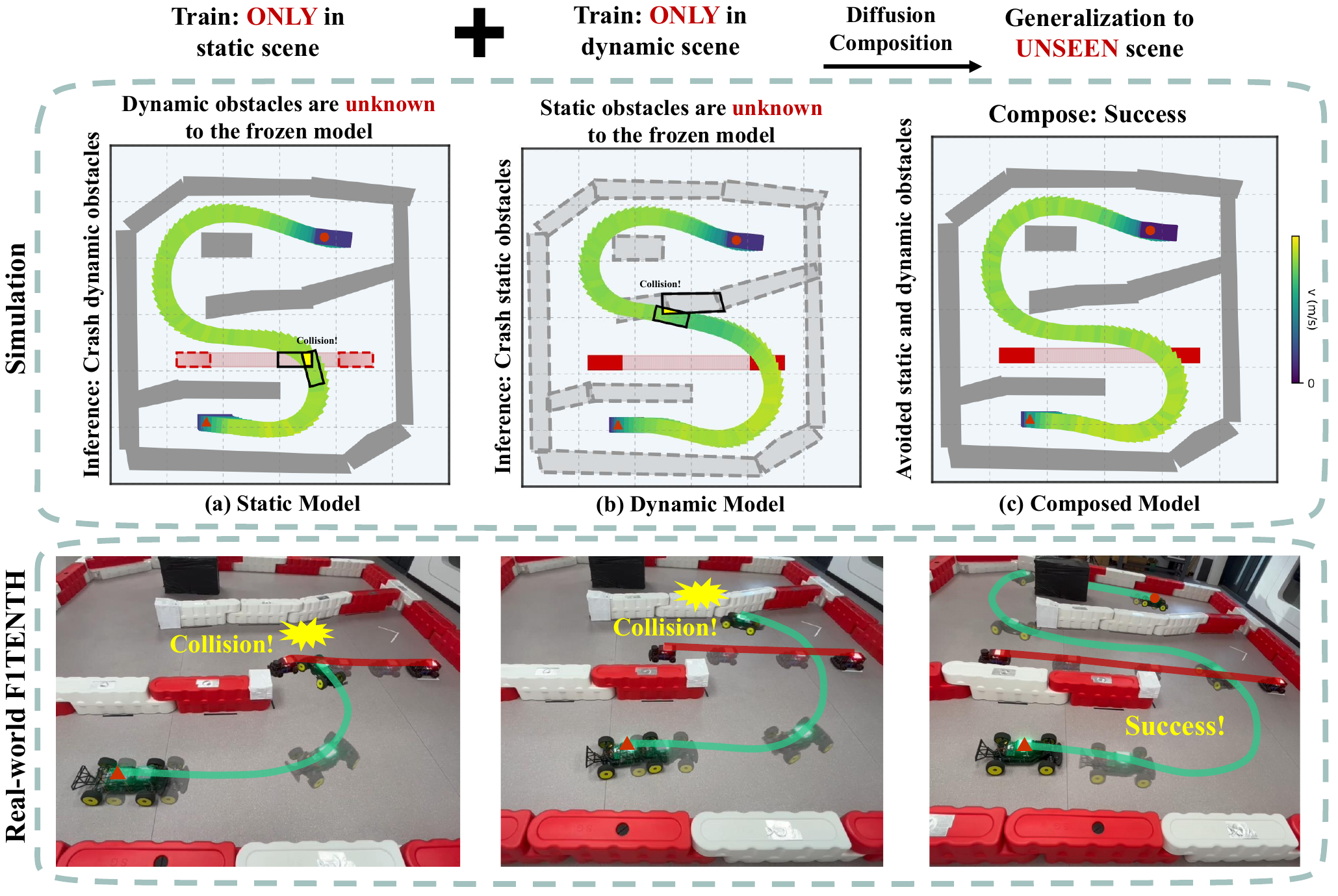
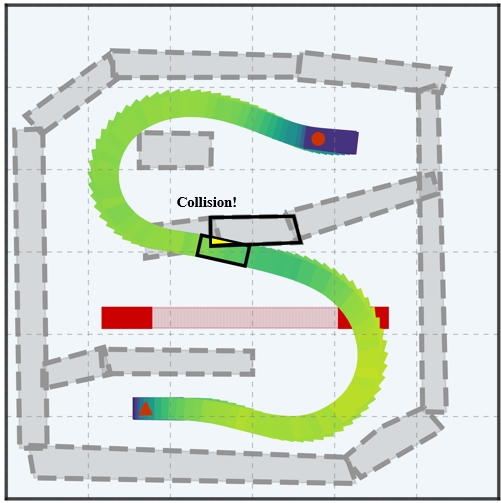
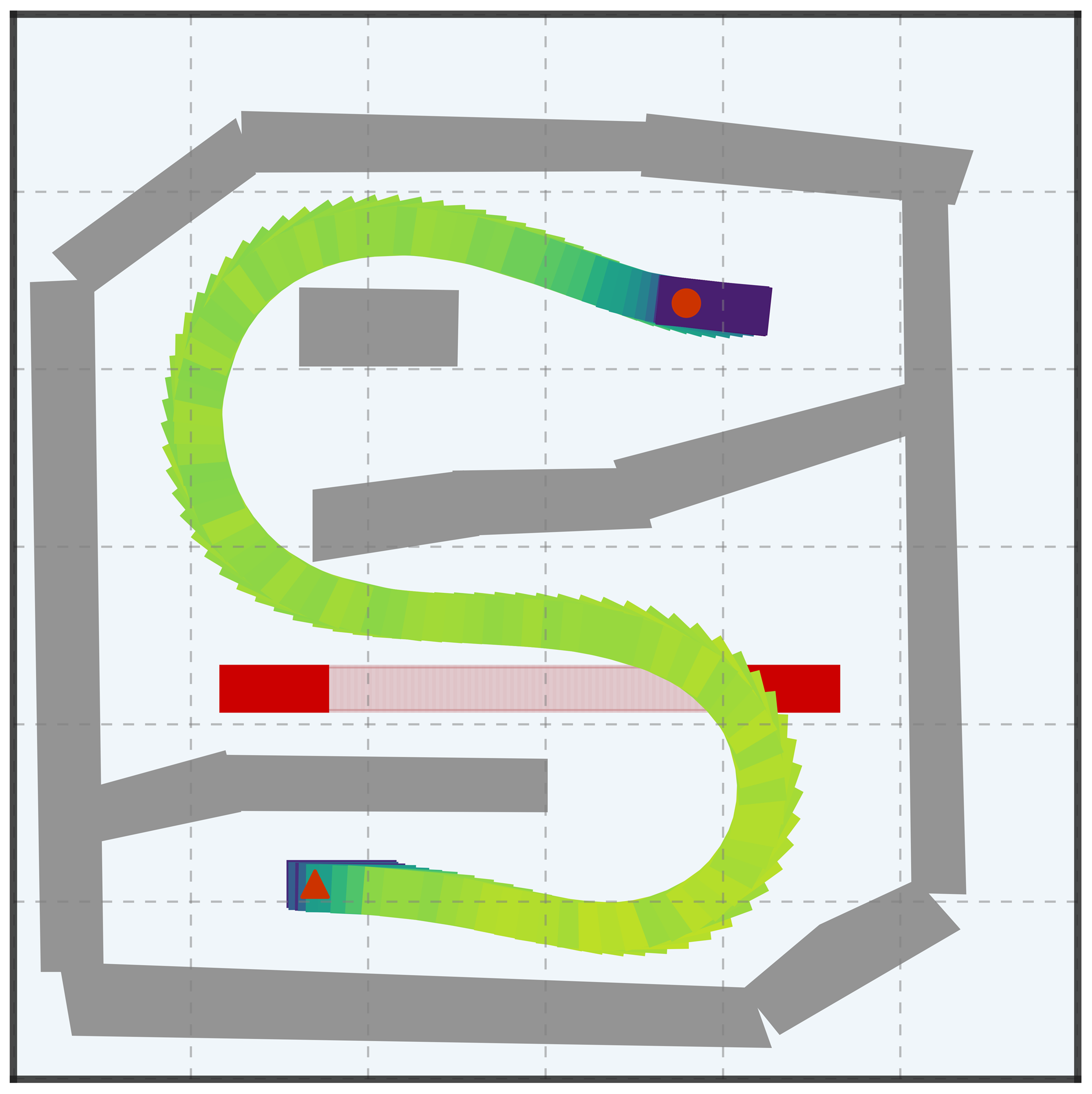
Diffusion Composition Enables Efficient, Safe Planning with Practical Real-world Performance.
An individual diffusion model cannot ensure safe trajectory planning in out-of-distribution scenarios, whereas composing multiple diffusion models can achieve safety during generalization. Dashed boxes indicate obstacles that do not exist during training. Validation on the F1TENTH platform shows that trajectories planned by the composed diffusion model offer excellent safety while maintaining computational efficiency, demonstrating effectiveness for practical real-world applications.